(VRML Model)
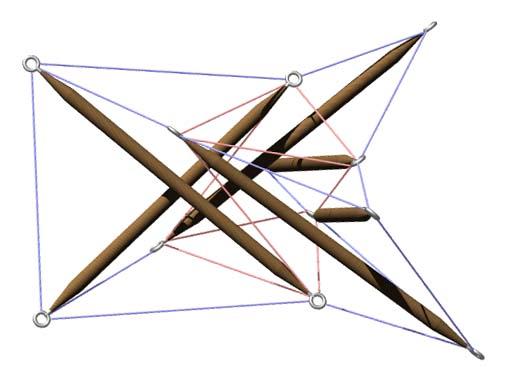
Here is a design based on Fig. 22 from Page 6 of Kenneth Snelson's U.S. Patent No. 3,169,611. It is a three-fold tensegrity prism supported by three X-Modules instead of struts. For me, it represents a merging of my interests in tensegrity domes, prisms and X-Modules columns. I've added three tendons to the design in Snelson's figure to stabilize the X-Modules' positions relative to the prism and separate their struts. The patent leaves out essential tendons frequently when diagramming things I think as a way of abbreviating and pointing up the essentials.
In the POV-Ray rendering above, the core prism tendons are shown in pink. This arrangement can serve as a hub uniting three X-Module columns. In traditional hexapent fashion, a dome or sphere could be constructed. With extended X-Module columns between the hubs, a fairly sparse sphere or dome could be obtained, but the omni-triangulation of the X-Module framework could still allow it to be very sturdy.
I think Snelson's figures understate the possibilities of X-Modules since they are shown with lesser strut clearances than are actually obtainable. The strut clearances on this design are probably the least satisfactory I've found in my work with X-Modules (clearance per unit strut length = 0.0853), but are still adequate. Due to the thickness of the X-Module columns, I think this can be mentioned with double-layer domes though it takes a different route to get away from a single-layer design. For true double-layer tensegrity dome concepts, see my Tensegrity Technology prospectus and the Prism Dome. I completed this design June 14, 2004.


