Zig-Zag Six-Stage Tensegrity Torus Datasheet
Copyright © 2004 by Bob Burkhardt
Member Descriptions
[name, end point names, weight (if in objective function),
second power of length (if a constraint), member category,
Obj/Con/Exc (put in objective function, use as a constraint or
exclude from computations), flags]
For assembly purposes, only the name and end point names are
of interest. The other information may be of interest after
A Practical Guide to Tensegrity Design has been consulted.
<Member> st13a pt1A pt3c 0.0 sqr(2.5) 1 Con CalcClear Inelastic *
<Member> st24a pt2A pt4a 0.0 sqr(2.5) 1 Con CalcClear Inelastic *
<Member> guy1a pt1A pt3b 1.00 0.0 3 Obj *
<Member> guy2a pt2A pt4b 1.00 + 0.40 0.0 3 Obj *
<Member> TS23a pt2A pt3a 0.0 sqr(0.92234) 2 Con *
<Member> tS23a pt2A pt3b 0.0 sqr(0.92234) 2 Con *
<Member> tT31a pt3a pt1C+ 1.40 + 0.40 0.0 3 Obj *
<Member> tT42a pt4a- pt2C 1.40 0.0 3 Obj *
<Member> TS41a pt4a pt1B+ 0.0 sqr(0.92234) 2 Con *
<Member> tS41a pt4a pt1C+ 0.0 sqr(0.92234) 2 Con *
<Member> st13b pt1B pt3a 0.0 sqr(2.5) 1 Con CalcClear Inelastic *
<Member> st24b pt2B pt4b 0.0 sqr(2.5) 1 Con CalcClear Inelastic *
<Member> guy1b pt1B pt3c 1.00 - 0.40 0.0 3 Obj *
<Member> guy2b pt2B pt4c 1.00 - 0.40 0.0 3 Obj *
<Member> TS23b pt2B pt3b 0.0 sqr(0.92234) 2 Con *
<Member> tS23b pt2B pt3c 0.0 sqr(0.92234) 2 Con *
<Member> tT31b pt3b pt1A+ 1.40 0.0 3 Obj *
<Member> tT42b pt4b- pt2A 1.40 + 0.40 0.0 3 Obj *
<Member> TS41b pt4b pt1C+ 0.0 sqr(0.92234) 2 Con *
<Member> tS41b pt4b pt1A+ 0.0 sqr(0.92234) 2 Con *
<Member> st13c pt1C pt3b 0.0 sqr(2.5) 1 Con CalcClear Inelastic *
<Member> st24c pt2C pt4c 0.0 sqr(2.5) 1 Con CalcClear Inelastic *
<Member> guy1c pt1C pt3a 1.00 + 0.40 0.0 3 Obj *
<Member> guy2c pt2C pt4a 1.00 0.0 3 Obj *
<Member> TS23c pt2C pt3c 0.0 sqr(0.92234) 2 Con *
<Member> tS23c pt2C pt3a 0.0 sqr(0.92234) 2 Con *
<Member> tT31c pt3c pt1B+ 1.40 - 0.40 0.0 3 Obj *
<Member> tT42c pt4c- pt2B 1.40 - 0.40 0.0 3 Obj *
<Member> TS41c pt4c pt1A+ 0.0 sqr(0.92234) 2 Con *
<Member> tS41c pt4c pt1B+ 0.0 sqr(0.92234) 2 Con *
Rotation Matrices
Only part of the structure is specified using the members
above. The rest is generated using symmetry transformations.
Here the first symmetry transformation is specified as a 3x3
pre-multiplication matrix in row-major format. Others are
constructed by multiplying the first one by itself. As with
the members, the first item is always the label used for
the transform.
<XMat> x1 cos(2*pi/3) (-sin(2*pi/3)) 0 sin(2*pi/3) cos(2*pi/3) 0 0 0 1
<CompositeXform> x2 x1 x1
In-Situ Member Lengths
These are the lengths of the members when they are in place
and prestress is applied. The strut lengths are from
screw-eye center to screw-eye center, as are the tendon lengths.
These values are in model units.
st13a: 2.5 st24a: 2.5 guy1a: 2.09336
guy2a: 1.62933 TS23a: 0.92234 tS23a: 0.92234
tT31a: 0.728105 tT42a: 1.25365 TS41a: 0.92234
tS41a: 0.92234 st13b: 2.5 st24b: 2.5
guy1b: 2.62470 guy2b: 2.62470 TS23b: 0.92234
tS23b: 0.92234 tT31b: 1.25365 tT42b: 0.728105
TS41b: 0.92234 tS41b: 0.92234 st13c: 2.5
st24c: 2.5 guy1c: 1.62933 guy2c: 2.09336
TS23c: 0.92234 tS23c: 0.92234 tT31c: 1.79050
tT42c: 1.79050 TS41c: 0.92234 tS41c: 0.92234
Relative Member Prestress Force Magnitudes
These values are useful for developing an assembly
strategy for the structure. The tighter tendons are much
easier to tie in place early on, while the looser tendons
can be left to the last. This information is also used
to adjust tendon lengths since the measured length of a tendon
will be shorter for a highly-stressed tendon with the same
in-situ length as a tendon which is not so stressed.
st13a: -3.13132 st24a: -4.79786 guy1a: 2.09336
guy2a: 2.28106 TS23a: 3.06458 tS23a: 1.83734
tT31a: 1.31059 tT42a: 1.75510 TS41a: 2.33437
tS41a: 1.83734 st13b: -4.52737 st24b: -4.52737
guy1b: 1.57482 guy2b: 1.57482 TS23b: 2.33437
tS23b: 2.42868 tT31b: 1.75510 tT42b: 1.31059
TS41b: 3.06458 tS41b: 2.26564 st13c: -4.79786
st24c: -3.13132 guy1c: 2.28106 guy2c: 2.09336
TS23c: 1.67473 tS23c: 2.26564 tT31c: 1.79050
tT42c: 1.79050 TS41c: 1.67473 tS41c: 2.42868
Average tendon force magnitude: 2.03423
Worst-Case Clearances in Model Units
These clearances are measured from member centerline to
member centerline. The labels of the two members are specified
as well as a transformation for the second member. If "id"
is specified for the transformation, it means none was applied.
0.245277 st13a tT42b id
0.208955 st13a st13c id
0.200477 st24a tT31a id
0.201645 st24a st13b id
0.211264 st24a st24b id
0.227265 st24a TS41b id
0.238605 st24a st13c id
0.238605 st24a st13c x1
0.208955 st24a st24c id
0.201645 st24a guy1c id
0.243467 st24a guy1c x1
0.201645 st24a tS23c id
0.211264 st13b st13c id
0.221504 st13b tT31c x2
0.243467 st13c guy2a id
0.201645 st13c guy2a x2
0.227265 st13c TS23a id
0.200477 st13c tT42b id
0.201645 st13c tS41b x2
0.245277 st24c tT31a id
Construction Lengths (in millimeters and halves)
The construction length of a tendon is less than the in-situ
length since when the tendon is measured off it isn't under
any prestress force. The construction length for the strut
represents the length of the 5/16-inch-diameter wooden dowel.
The tendons were made of braided nylon fishing line.
Prestress forces were assumed not to affect strut lengths.
Elongation of Tendon of Unit Cross Section
Under Force of Average Magnitude (fraction)> .02
Length Scale Factor> 290/2.5
Strut and Tendon Hub Adjustments - s;t> 5 3.5
(The 5 mm adjustment for the strut is the amount
the screw-eye center extends from the dowel. The 3.5 mm
adjustment for the tendon is half the outer diameter of the
screw eye.)
st13a: 280 0 st24a: 280 0 guy1a: 231 0 guy2a: 178 0
TS23a: 97 0 tS23a: 98 0 tT31a: 76 1 tT42a: 136 0
TS41a: 97 1 tS41a: 98 0 st13b: 280 0 st24b: 280 0
guy1b: 293 0 guy2b: 293 0 TS23b: 97 1 tS23b: 97 1
tT31b: 136 0 tT42b: 76 1 TS41b: 97 0 tS41b: 98 0
st13c: 280 0 st24c: 280 0 guy1c: 178 0 guy2c: 231 0
TS23c: 98 1 tS23c: 98 0 tT31c: 197 0 tT42c: 197 0
TS41c: 98 1 tS41c: 97 1
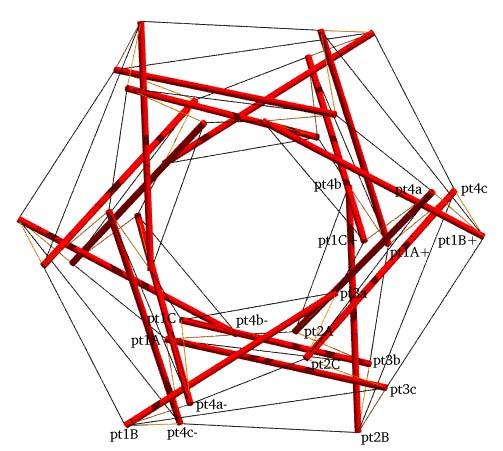
Axial View of the Six-Stage Tensegrity Torus
with Point Labels
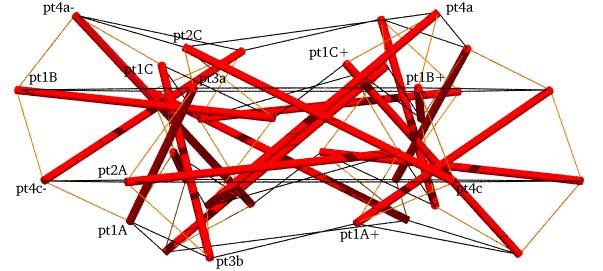
Plane View of the Six-Stage Tensegrity Torus
with Point Labels
Schematic for the Tensegrity Torus
structure file: torus/x3l06torus1.rc
variable file: torus/x3l06torus1.dat
digit list: src/mm.dls
|
CONTACT:
Bob Burkhardt
Tensegrity Solutions
Box 426164
Cambridge, MA 02142-0021
USA
e-mail:
bobwb@juno.com
Back to Ten-stage Tensegrity Torus
More Datasheets